
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Федеральное агентство по образованию
Нижегородский государственный университет
Кафедра «Теоретическая механика»
РАСЧЕТ МАХОВИКА
Методические указания к курсовому проекту
по теории механизмов и машин
для студентов всех форм обучения
Н. Новгород 2005
Составители: ,
УДК 621.01/075/
Расчет маховика: Методические указания к курсовому проекту по теории механизмов и машин для студентов всех форм обучения / НГТУ; Сост.: , . – Н. Новгород, 2005. с.
Научный редактор
©Нижегородский государственный
технический университет, 2005
![]()
1.Теоретическая часть
Расчёт маховика заключается в определении его момента инерции ![]() при заданном коэффициенте неравномерности движения механизма
при заданном коэффициенте неравномерности движения механизма ![]() и средней угловой скорости ведущего звена
и средней угловой скорости ведущего звена ![]() .
.
Различают три периода движения механизма: разбег, установившееся движение, выбег (рис.1). Часто представляет интерес период установившегося движения, в котором положения, скорости и ускорения звеньев механизма периодически повторяются, поэтому достаточно изучить его движения в течение цикла![]() .
.
Для упрощения расчётов механизм заменяют динамической моделью – звеном, к которому приводятся массы и моменты инерции масс всех звеньев, а также силы и моменты сил, действующие на механизм. Это звено называется звеном приведения. В результате получают схему, изображённую на рис.2, где ![]() - приведённый момент инерции,
- приведённый момент инерции,  и
и  - приведённые моменты движущих сил и сил сопротивления. Ясно, что
- приведённые моменты движущих сил и сил сопротивления. Ясно, что ![]() , и зависят от положения механизма, которое в свою очередь определяется положением ведущего звена, например, координатой
, и зависят от положения механизма, которое в свою очередь определяется положением ведущего звена, например, координатой ![]() при одной степени подвижности механизма. В большинстве случаев в качестве звена приведения принимают ведущее звено механизма.
при одной степени подвижности механизма. В большинстве случаев в качестве звена приведения принимают ведущее звено механизма.
Из условий эквивалентности динамической модели и механизма (равенства их кинетических энергий) определяется приведённый момент инерции механизма![]() . Этим моментом инерции обладает звено приведения в рассматриваемом положении механизма:
. Этим моментом инерции обладает звено приведения в рассматриваемом положении механизма:
 , [1]
, [1]
где ![]() - момент инерции самого звена приведения;
- момент инерции самого звена приведения;
![]() - приведённые к звену 1 моменты инерции звеньев, незави -
- приведённые к звену 1 моменты инерции звеньев, незави -
сящие от положения механизма;
![]() - угловая скорость звена приведения, с-1;
- угловая скорость звена приведения, с-1;
![]() - масса i-го звена (кг) и скорость его центра масс, мс-1;
- масса i-го звена (кг) и скорость его центра масс, мс-1;
![]() - момент инерции массы относительно центра тяжести
- момент инерции массы относительно центра тяжести
(кгм2) и угловая скорость i-го звена (с-1).
Удобно выразить угловые и линейные скорости через длины векторов планов скоростей. Если приведение выполняется к ведущему звену ОА, тогда
 ;
;  ;
;  ,
,
где ![]() - длина вектора скорости центра масс i-го звена, мм;
- длина вектора скорости центра масс i-го звена, мм;
![]() - угловая скорость i-го звена, с-1;
- угловая скорость i-го звена, с-1;
![]() - длина вектора относительной скорости точек K и N, мм;
- длина вектора относительной скорости точек K и N, мм;
![]() - длина звена KN, мм;
- длина звена KN, мм;
![]() - длина вектора скорости точки А, мм;
- длина вектора скорости точки А, мм;
![]() - истинная длина звена ОА, мм;
- истинная длина звена ОА, мм;
![]() - масштаб плана скоростей, мс-1/мм.
- масштаб плана скоростей, мс-1/мм.
Теперь выражение для приведённого момента инерции можно записать следующим образом:
 , [2]
, [2]
Вычислив![]() для ряда последовательных положений механизма за один цикл его движения, строят график
для ряда последовательных положений механизма за один цикл его движения, строят график ![]() (рис.3).
(рис.3).
Приведение сил и моментов сил, действующих на механизм, осуществляется также при условии эквивалентности динамической модели и механизма, а именно: сумма работ сил и моментов на возможных перемещениях системы равна работе приведённого момента ![]() также на возможном перемещении звена приведения. От этого условия переходят к равенству соответствующих мощностей и определяют
также на возможном перемещении звена приведения. От этого условия переходят к равенству соответствующих мощностей и определяют ![]() :
:
 , [3]
, [3]
где![]() - приведённый момент, приложенный к звену приведения, Нм;
- приведённый момент, приложенный к звену приведения, Нм;
![]() - сила, приложенная к i-ой точке (Н) и скорость этой точки, мс-1;
- сила, приложенная к i-ой точке (Н) и скорость этой точки, мс-1;
![]() - угол между направлениями силы
- угол между направлениями силы ![]() и скорости
и скорости ![]() ;
;
![]() - момент, приложенный к i-му звену, Нм;
- момент, приложенный к i-му звену, Нм;
![]() - угловая скорость звена приведения, с-1.
- угловая скорость звена приведения, с-1.
Приведённые моменты вычисляют методом, изложенным в силовом анализе. При этом силы инерции и моменты сил инерции звеньев учитывать не нужно, так как рассматривается безмассовый скелет механизма со всеми приложенными к нему нагрузками. Массы звеньев уже учтены при определении приведённого момента инерции ![]() .
.
Приведённым моментом ![]() может быть как момент сил сопротивления, так и движущий момент. Если рассматривается рабочая машина, то для упрощения расчётов часто принимают движущий момент
может быть как момент сил сопротивления, так и движущий момент. Если рассматривается рабочая машина, то для упрощения расчётов часто принимают движущий момент ![]() постоянным, а приведённый момент сопротивления
постоянным, а приведённый момент сопротивления ![]() находится вышеуказанным способом. При расчёте машины-двигателя вычисляется приведённый движущий момент, а момент сопротивления для простоты может быть принят постоянным.
находится вышеуказанным способом. При расчёте машины-двигателя вычисляется приведённый движущий момент, а момент сопротивления для простоты может быть принят постоянным.
Вычислив ![]() для ряда последовательных положений механизма за один цикл его движения, строят график
для ряда последовательных положений механизма за один цикл его движения, строят график ![]() (рис.4).
(рис.4).
Теперь для расчётов можно использовать схему механизма, изображённую на рис.2. Связь между угловой скоростью звена приведения![]() , его моментом инерции
, его моментом инерции ![]() и кинетической энергией
и кинетической энергией ![]() выражается известной зависимостью
выражается известной зависимостью
 , [4]
, [4]
отсюда может быть найдена скорость звена приведения ωП:
 , [5].
, [5].
Кинетическая энергия механизма Т не остаётся постоянной в течение цикла по причине несоответствия законов изменения движущего момента ![]() и момента сил сопротивления
и момента сил сопротивления ![]() , а также вследствие непостоянства приведённого момента инерции
, а также вследствие непостоянства приведённого момента инерции ![]() . Поэтому скорость звена приведения также будет постоянной.
. Поэтому скорость звена приведения также будет постоянной.
Энергия, подводимая к механизму и потребляемая им, в каждый момент времени не равны между собой (рис.8). Их равенство возможно лишь при установившемся движении за время цикла (внутри цикла равенства нет).
Для исследования неравномерности движения звена приведения определяется «избыточная» энергия механизма в течение цикла его движения, которая представляет собой разность работ движущих сил и сил
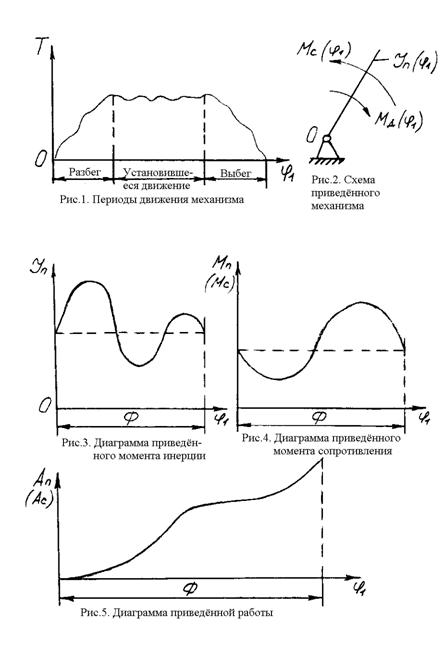
сопротивления. С этой целью графически интегрируют зависимость  и строят диаграмму работ
и строят диаграмму работ ![]() приведённого момента (рис.5).
приведённого момента (рис.5).
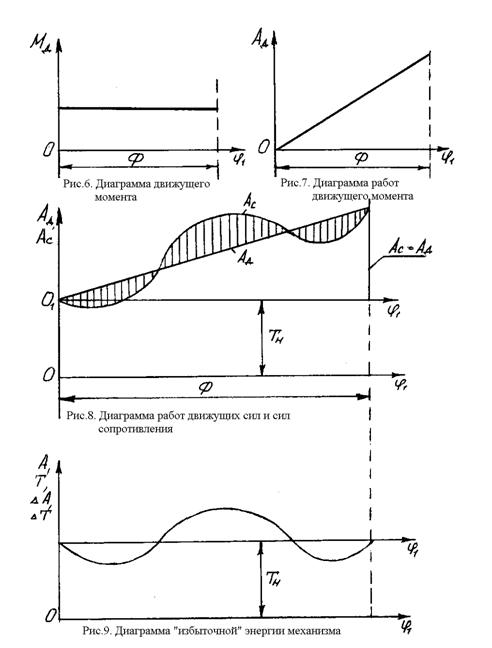
Если рассматривается рабочая машина ( ); тогда для упрощения расчётов следует принять величину движущего момента постоянной (рис.6). Диаграмма работы движущего момента
); тогда для упрощения расчётов следует принять величину движущего момента постоянной (рис.6). Диаграмма работы движущего момента ![]() изобразится прямой линией (рис.7). Это не особенно противоречит действительности, так как в идеальном случае скорость звена приведения должна быть постоянной, что требует постоянства движущего момента , поскольку . В ином случае необходимо иметь закон изменения движущего момента за цикл.
изобразится прямой линией (рис.7). Это не особенно противоречит действительности, так как в идеальном случае скорость звена приведения должна быть постоянной, что требует постоянства движущего момента , поскольку . В ином случае необходимо иметь закон изменения движущего момента за цикл.
Вследствие того, что приращение энергии за цикл движения механизма не происходит, работа сил сопротивления должна быть равна работе движущих сил (рис.8). Это требует равенства площадей графиков и (рис.4 и 6) в пределах цикла , что в свою очередь требует равенства ординат графиков работ ![]() и
и ![]() в конце цикла. «Избыточная» энергия (заштрихованная площадь на рис.8) превращается в кинетическую энергию механизма и изменяет скорость его движения (рис.9). Теперь очевидно, что вместо «избыточной» работы ∆ можно подставить изменение кинетической энергии механизма ∆ (рис.9), которую для удобства вычислений делят на две части: 1) кинетическую энергию звеньев
в конце цикла. «Избыточная» энергия (заштрихованная площадь на рис.8) превращается в кинетическую энергию механизма и изменяет скорость его движения (рис.9). Теперь очевидно, что вместо «избыточной» работы ∆ можно подставить изменение кинетической энергии механизма ∆ (рис.9), которую для удобства вычислений делят на две части: 1) кинетическую энергию звеньев![]() , 2) изменение кинетической энергии маховика ∆ :
, 2) изменение кинетической энергии маховика ∆ :
∆Т = ∆ТМ+ТЗ,
откуда ∆ТМ = ∆Т-ТЗ.
Следует иметь в виду, что диаграмма, изображённая на рис.9, с началом координат в точке О1 показывает не полное изменение энергии механизма, так как при вычислении работ внешних сил за цикл не учитывается начальное значение кинетической энергии ![]() , которое определяется начальными условиями, а они, как правило, неизвестны. Полная энергия механизма изображалась бы тем же графиком, но с началом координат в точке O, то есть ось абсцисс сместилась бы на величину начального значения кинетической энергии. Далее будет показано, что величину начальной энергии
, которое определяется начальными условиями, а они, как правило, неизвестны. Полная энергия механизма изображалась бы тем же графиком, но с началом координат в точке O, то есть ось абсцисс сместилась бы на величину начального значения кинетической энергии. Далее будет показано, что величину начальной энергии ![]() для расчёта маховика знать не требуется.
для расчёта маховика знать не требуется.
Существуют три метода расчёта маховика.
2. Виттенбауэра
Ввиду того, что угловая скорость звена приведения зависит от его кинетической энергии ![]() и приведённого момента инерции
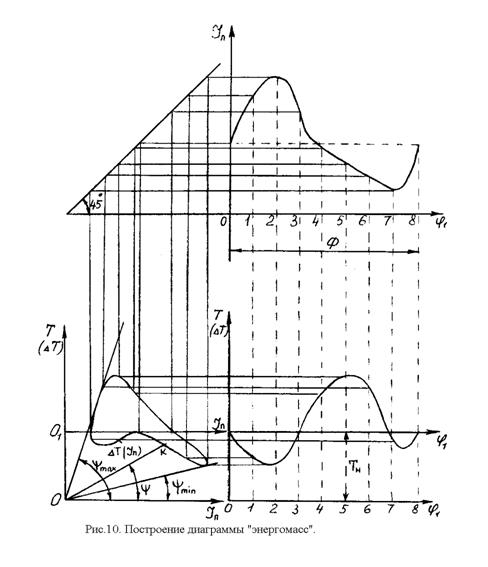
и приведённого момента инерции ![]() , оказывается удобным построить диаграмму энергомасс
, оказывается удобным построить диаграмму энергомасс ![]() , исключив параметр
, исключив параметр ![]() из выражений
из выражений ![]() и
и ![]() , например, графически, как показано на рис.10. Очевидно, что диаграмма энергомасс всегда будет замкнутой кривой для одного цикла движения механизма, а её характер не зависит от величины начального значения энергии
, например, графически, как показано на рис.10. Очевидно, что диаграмма энергомасс всегда будет замкнутой кривой для одного цикла движения механизма, а её характер не зависит от величины начального значения энергии ![]() . Из (рис.10) следует, что произвольной точке диаграммы энергомасс соответствует определённый угол наклона прямой, проведённой из начала координат в эту точку:
. Из (рис.10) следует, что произвольной точке диаграммы энергомасс соответствует определённый угол наклона прямой, проведённой из начала координат в эту точку:
![]() , [6]
, [6]
где ![]() и
и ![]() - масштабы осей моментов инерции и кинетических
- масштабы осей моментов инерции и кинетических
энергий.
Так как ![]() , то можно записать:
, то можно записать:
![]() или
или ![]() ,
,
то есть каждому углу наклона прямой, соединяющей произвольную точку диаграммы с началом координат, соответствует определённая угловая скорость звена приведения или каждому значению угловой скорости звена приведения соответствует определённый угол наклона прямой, проведённой из начала координат через соответствующую точку диаграммы.
Максимальному и минимальному углам наклона касательных соответствуют максимальная и минимальная угловые скорости звена приведения:
 , [7]
, [7]
Такие скорости возникают в механизме без маховика. Коэффициент ![]() в этом случае не равен заданному
в этом случае не равен заданному![]() .
.
Можно найти угловые скорости ![]() и
и ![]() через заданный коэффициент неравномерности движения
через заданный коэффициент неравномерности движения ![]() и определить соответствующие углы наклона касательных к диаграмме «энергомасс».
и определить соответствующие углы наклона касательных к диаграмме «энергомасс».
Так как ![]()
![]() и
и ![]() ;
;
то ![]() . [8]
. [8]
Возводя в квадрат ![]() и
и ![]() и пренебрегая величиной
и пренебрегая величиной ![]() , найдём:
, найдём:
 . [9]
. [9]
Теперь определим углы ![]() и
и ![]() :
:
 [10]
[10]
Точка пересечения касательных определит новое начало координат, которое будет соответствовать диаграмме «энергомасс» механизма с заданным коэффициентом неравномерности ![]() при средней угловой скорости
при средней угловой скорости![]() (рис.11). Но для этого приведённый момент инерции должен отличаться от предыдущего значения на величину
(рис.11). Но для этого приведённый момент инерции должен отличаться от предыдущего значения на величину ![]() , а кинетическая энергия при этом изменится на величину
, а кинетическая энергия при этом изменится на величину ![]() .
.
Таким образом, чтобы удовлетворить заданной неравномерности движения при определенной средней скорости, необходимо увеличить момент инерции звена приведения на величину ![]() . Это достигается установкой маховика с моментом инерции
. Это достигается установкой маховика с моментом инерции ![]() , который можно найти по диаграмме (рис.11):
, который можно найти по диаграмме (рис.11):
 .
.
Часто возникает затруднение в определении отрезка ![]() , так как начало координат новой системы находится вне чертежа вследствие малой разницы углов
, так как начало координат новой системы находится вне чертежа вследствие малой разницы углов ![]() и
и ![]() . Поэтому пользуются следующим способом. Выразив
. Поэтому пользуются следующим способом. Выразив ![]() через
через ![]() и
и ![]() :
:
![]()
и подставив вместо ![]() , получим
, получим
![]() [11]
[11]
Из рис.11 видно, что ![]() ;
; ![]() , поэтому
, поэтому
 ,
,
но  , тогда момент инерции маховика
, тогда момент инерции маховика
![]() . [12]
. [12]
Следует заметить, что ![]() – изменение кинетической энергии маховика, поэтому выражение для момента инерции маховика примет вид:
– изменение кинетической энергии маховика, поэтому выражение для момента инерции маховика примет вид:
![]() .
.
Из вышеуказанного ясно, что положение оси ![]() никак не влияет на величину момента инерции маховика
никак не влияет на величину момента инерции маховика ![]() , поэтому начальное значение кинетической энергии
, поэтому начальное значение кинетической энергии ![]() вычислять не требуется. То есть используется диаграмма «энергомасс»
вычислять не требуется. То есть используется диаграмма «энергомасс» ![]() с началом координат в точке О1 (рис.10).
с началом координат в точке О1 (рис.10).
При больших значениях углов и пересечение касательных к диаграмме «энергомасс» с осью ординат происходит вне чертежа. В этом случае для определения величины отрезка ![]() на оси ординат используются известные углы наклона касательных к диаграмме «энергомасс». Этот способ показан в примере расчёта.
на оси ординат используются известные углы наклона касательных к диаграмме «энергомасс». Этот способ показан в примере расчёта.
3. Гутьяра
Определяется максимальное изменение кинетической энергии маховика ∆ТМ, а затем по формуле ![]() вычисляется его момент инерции.
вычисляется его момент инерции.
Максимальное изменение кинетической энергии маховика:
 , [13]
, [13]
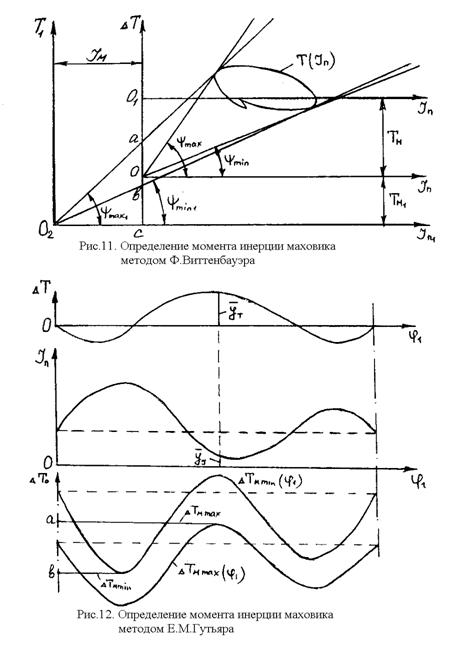
где  и
и  - максимальное и минимальное значения кинетической энергии маховика, определяемые по формулам
- максимальное и минимальное значения кинетической энергии маховика, определяемые по формулам
 , [14]
, [14]
 , [15]
, [15]
где ![]() - «избыточная» энергия, подводимая к безмассовому механизму;
- «избыточная» энергия, подводимая к безмассовому механизму;
 - максимальная и минимальная кинетические энергии звень -
- максимальная и минимальная кинетические энергии звень -
ев механизма.
![]() определяется графически:
определяется графически:
- строится диаграмма «избыточной» энергии ![]() (рис.12);
(рис.12);
- под диаграммой  строится диаграмма приведённого момента
строится диаграмма приведённого момента
инерции YП (φ1);
- из избыточной энергии механизма для каждого положения вычитается
энергия звеньев, соответствующая максимальной угловой скорости
звена приведения, затем процедура повторяется для минимальной ско-
рости;
- строятся диаграммы максимального и минимального изменений кине -
тической энергии маховика за цикл;
- по диаграммам  и
и  находится максимальное
находится максимальное
изменение энергии маховика за цикл ![]() .
.
Вычисление удобно производить следующим образом. Изменение кинетической энергии механизма определяется как произведение масштаба диаграммы кинетической энергии на ординату графика ![]() . Аналогично находится значение приведённого момента инерции:
. Аналогично находится значение приведённого момента инерции:
![]() ;
; ![]()
Максимальная и минимальная величина кинетической энергии маховика для каждого положения вычисляется, согласно изложенному выше, как разность «избыточной» энергии и кинетической энергии звеньев:  ;
;
 ;
;
где  ;
;  .
.
Вычислив максимальные и минимальные значения кинетических энергий маховика для ряда последовательных положений механизма, строят диаграммы ![]() и
и ![]() , по которым находится максимальное изменение кинетической энергии маховика в течение цикла:
, по которым находится максимальное изменение кинетической энергии маховика в течение цикла:
 .
.
Момент инерции маховика находится по приведённой выше зависимости:
 . [16]
. [16]
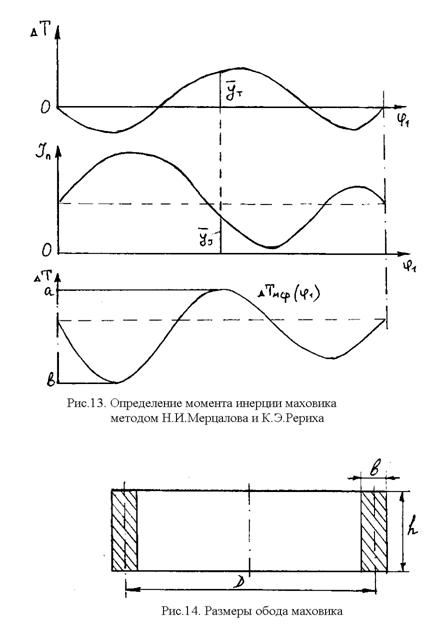
4. Мерцалова и
При достаточно малом значении коэффициента неравномерности ![]() квадраты угловых скоростей
квадраты угловых скоростей ![]() и
и ![]() отличаются незначительно, поэтому невелика разница энергий и . В связи с этим можно принять (допустив некоторую погрешность) среднее значение кинетической энергии маховика
отличаются незначительно, поэтому невелика разница энергий и . В связи с этим можно принять (допустив некоторую погрешность) среднее значение кинетической энергии маховика ![]() вместо
вместо ![]() и
и ![]() .
.
Выражение для кинетической энергии маховика примет вид:
 . [17]
. [17]
Вычисление ![]() осуществляется вышеизложенным методом (рис.13):
осуществляется вышеизложенным методом (рис.13):
![]() ,
,
где  ;
; ![]() .
.
По известному значению момента инерции маховика ![]() можно найти его размеры. Если форму маховика принять в виде кольца (рис.14), у которого диаметр
можно найти его размеры. Если форму маховика принять в виде кольца (рис.14), у которого диаметр ![]() значительно больше толщины
значительно больше толщины ![]() , тогда
, тогда
![]() ; [18]
; [18]
где ![]() – масса маховика, определяемая известным образом:
– масса маховика, определяемая известным образом:
![]() . [19]
. [19]
Здесь ![]() – плотность материала,
– плотность материала, ![]() и
и ![]() – размеры сечения обода маховика.
– размеры сечения обода маховика.
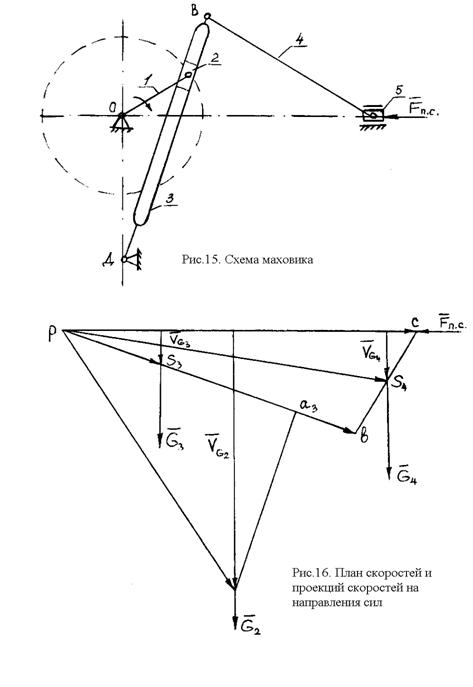
5. Пример расчёта
Определить размеры маховика для механизма, изображённого на рис.15. Коэффициент неравномерности движения  , средняя угловая скорость ведущего звена
, средняя угловая скорость ведущего звена  с-1.
с-1.
Независимо от применяемого метода расчёта маховика сначала требуется построить диаграммы приведённого момента инерции ![]() и приведённого момента сопротивления
и приведённого момента сопротивления ![]() в функции угла поворота кривошипа
в функции угла поворота кривошипа ![]() . В примере вычисление производится только для 6-го положения механизма.
. В примере вычисление производится только для 6-го положения механизма.
5.1. Построение диаграммы приведённого момента сопротивления.
Для построения указанной диаграммы используем метод возможных перемещений. Отличие в определении приведённого момента сопротивления от определения уравновешивающего момента ![]() состоит в том, что по вышеизложенным причинам не учитываются инерционные нагрузки. Приведённый момент сопротивления вычисляется по известной зависимости (3):
состоит в том, что по вышеизложенным причинам не учитываются инерционные нагрузки. Приведённый момент сопротивления вычисляется по известной зависимости (3):
 ,
,
где  - проекции скоростей на направления сил (рис.16).
- проекции скоростей на направления сил (рис.16).
Так как в нашем примере нет моментов сил, то формула для приведённого момента сопротивления примет вид:
 .
.
Вычислим приведённый момент сопротивления для 6-го положения механизма:
Данные для расчёта и полученные результаты сводятся в таблицу 1:
Таблица 1.
К определению приведённого момента сопротивлений.
Поло- жения меха- низма | ВЕЛИЧИНЫ | ||||||||
Н |
мм |
Н |
мм |
Н |
мм |
Н |
мм |
Нм | |
1 | |||||||||
2 | |||||||||
. | |||||||||
. | |||||||||
6 | 25 | 135 | 78,4 | 21 | 28,4 | 108 | 117,5 | 14 | 2,38 |
. | |||||||||
. | |||||||||
12 |
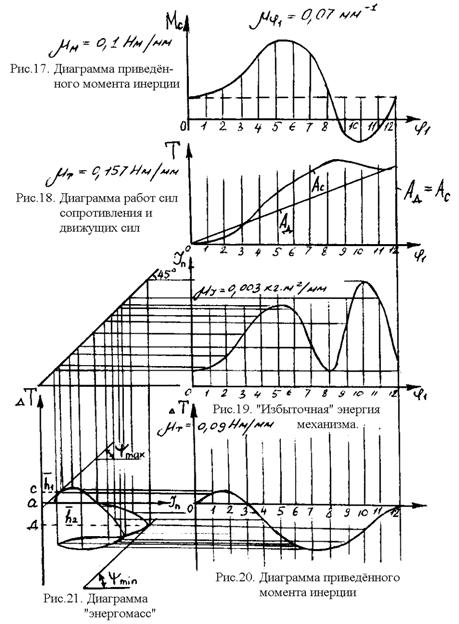
По данным таблицы строится диаграмма приведённого момента сопротивления (рис.17).
Графическим интегрированием диаграммы приведённого момента сопротивлений получают диаграмму работ сил сопротивлений (рис.18).
На той же диаграмме (рис.18) строится график работ движущих сил. Для этого достаточно соединить начало координат с точкой графика работ сил сопротивлений, соответствующей концу цикла.
Вычитая ординаты диаграммы работ сил сопротивлений и движущих сил, получают диаграмму «избыточной» энергии механизма (рис.19).
5.2. Построение диаграммы приведённого момента инерции.
Величина приведённого момента инерции для каждого положения механизма вычисляется по зависимости (2):
.
Кривошип, как правило, уравновешен путём установки противовеса на продолжении звена АО. Масса звена ОА ![]() кг. Это звено может быть уравновешено, например, массой такой же величины, расположенной на расстоянии, равном АО/2, тогда момент инерции звена 1-
кг. Это звено может быть уравновешено, например, массой такой же величины, расположенной на расстоянии, равном АО/2, тогда момент инерции звена 1- ![]() будет равен сумме моментов инерции кривошипа ОА –
будет равен сумме моментов инерции кривошипа ОА –![]() и противовеса
и противовеса ![]() :
:
![]() кг·мм2.
кг·мм2.
Данные для расчёта в 6-ом положении механизма:
 ;
;  ;
;  ;
; ![]() ;
;
![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() - вектор скорости ц. т. звена 2;
- вектор скорости ц. т. звена 2; ![]() ;
; ![]() ;
; ![]() (рис.16).
(рис.16).
![]() , так как масса ползуна считается сосредоточенной в точке А.
, так как масса ползуна считается сосредоточенной в точке А.
 ;
;
![]() .
.
Для звеньев 3 и 4 векторам ![]() соответствуют векторы
соответствуют векторы ![]() и
и ![]() ;
; ![]() ;
; ![]() , поэтому
, поэтому
 ;
;  .
.
Подставив в зав-ть для ![]() полученные числовые значения величин и найдём приведённый момент инерции для 6-го положения механизма:
полученные числовые значения величин и найдём приведённый момент инерции для 6-го положения механизма:
Аналогично определяются приведённые моменты инерции для других положений механизма. Для удобства вычислений составляется таблица.
Таблица 2.
К определению приведённого момента инерции.
Параметры | Положение механизма | ||||||||
1 | . | . | . | 6 | . | . | . | 12 | |
| 3 | ||||||||
| 130 | ||||||||
| 12 | ||||||||
| 42 | ||||||||
| 0,145 | ||||||||
| 128 | ||||||||
| 330 | ||||||||
| 8 | ||||||||
| 134 | ||||||||
| 0,0384 | ||||||||
| 50 | ||||||||
| 240 | ||||||||
| 4 | ||||||||
| 135 | ||||||||
| 0,2 |
По вычисленным значениям приведённых моментов инерции строится диаграмма приведённого момента инерции механизма (рис.20). На этом заканчивается общая для всех методов часть расчёта.
5.3. Определение момента инерции маховика методом
Ф. Виттенбауэра
Согласно изложенному ранее, строится диаграмма энергомасс  графическим исключением параметра
графическим исключением параметра ![]() из диаграмм
из диаграмм ![]() и
и ![]() (рис.21).
(рис.21).
Находим начало координат системы, в которой диаграмма энергомасс соответствует механизму с коэффициентом неравномерности ![]()
при средней угловой скорости с-1. Для этого определяем максимальное и минимальное значения углов наклона касательных к диаграмме энергомасс:
 ,
,
 .
.
Удобнее пользоваться тангенсами углов, а не сами углами ![]() и
и ![]() , так как упрощается проведение касательных.
, так как упрощается проведение касательных.
Точка пересечения касательных является искомым началом координат. Если начало координат окажется вне чертежа, то используют отрезок ![]() , отсекаемый касательными на оси кинетических энергий. В рассматриваемом примере точка
, отсекаемый касательными на оси кинетических энергий. В рассматриваемом примере точка ![]() находится вне чертежа (рис.21). Из рис.22 ясно, как определяется длина отрезка
находится вне чертежа (рис.21). Из рис.22 ясно, как определяется длина отрезка ![]() . Для нашего примера (рис.21) имеем:
. Для нашего примера (рис.21) имеем:
 , но
, но ![]() , поэтому
, поэтому
 ,
,
![]() мм;
мм;
![]() мм;
мм;
![]() находится измерением;
находится измерением;
 мм.
мм.
Момент инерции маховика
![]() кгм2.
кгм2.
5.4. Определение момента инерции маховика методом
Одну под другой строят диаграммы и ![]() (рис.23). Вычитая из «избыточной» энергии механизма
(рис.23). Вычитая из «избыточной» энергии механизма ![]() максимальную и мини
максимальную и мини
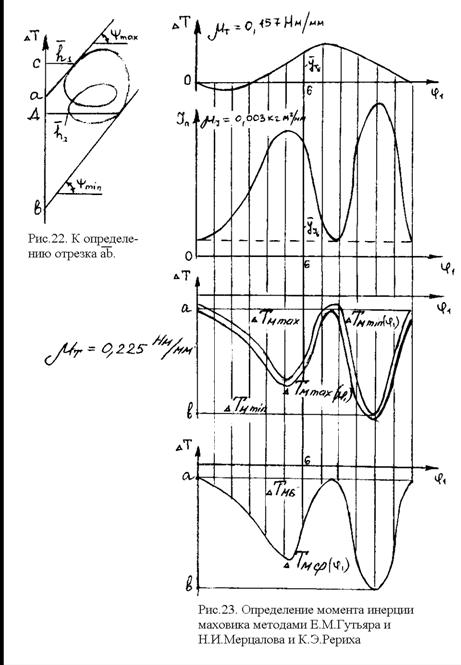
мальную энергию звеньев, получают две диаграммы кинетических энергий маховика ![]() и
и  (рис.23).
(рис.23).
Значения ординат диаграмм ![]() и
и ![]() для 6-го положения механизма определяются следующим образом:
для 6-го положения механизма определяются следующим образом:
 ;
;
 .
.
Здесь  ;
;
![]() ;
;
![]()
![]() ;
;
 1/с2,
1/с2, ![]() 1/с2.
1/с2.
По этим двум диаграммам определяют максимальное изменение кинетической энергии маховика за цикл ![]() :
:
![]() Нм.
Нм.
Вычисляем момент инерции маховика:
 кгм2.
кгм2.
5.5. Определение момента инерции маховика методом
и
Как и в предыдущем случае, строятся диаграммы и ![]() . Из «избыточной» энергии механизма вычитается средняя энергия звеньев и строится диаграмма изменения кинетической энергии маховика за цикл
. Из «избыточной» энергии механизма вычитается средняя энергия звеньев и строится диаграмма изменения кинетической энергии маховика за цикл ![]() (рич.23).
(рич.23).
Для 6-го положения механизма ордината диаграмм ![]() определяется следующим образом:
определяется следующим образом:
![]() Нм.
Нм.
Здесь  .
.
Максимальное изменение кинетической энергии маховика
![]() Нм.
Нм.
Момент инерции маховика определяется известным образом:
 кгм2.
кгм2.
5.6. Определение размера маховика.
Средний диаметр обода маховика (рис.14) определяется из зависимости момента инерции:
 .
.
Задавшись сечением обода маховика ![]() ×
× ![]() и плотностью материала
и плотностью материала ![]() , определяют средний диаметр обода.
, определяют средний диаметр обода.
Пусть ![]() мм,
мм, ![]() м,
м, ![]() кг/м3, тогда
кг/м3, тогда ![]() . Примем
. Примем ![]() кгм2 – среднее значение по трём методам определения момента инерции маховика и найдём средний диаметр обода:
кгм2 – среднее значение по трём методам определения момента инерции маховика и найдём средний диаметр обода:
 м =
м = ![]() мм.
мм.
ЛИТЕРАТУРА
Теория механизмов и механика машин: Учеб. для вузов/ Под ред. . – М.: Высш. шк., 2003. Динамика механизмов : Учеб. пособие / Под ред. . – М.: Изд-во МГТУ, 2001. , Тимофеев проектирование по теории механизмов и механике машин. – М.: Высш. шк. , 2002.